

當下常掛在嘴邊的L2級別自動駕駛到底是什么?有了它就能自動駕駛嗎?其實大多數人在其中還有很多誤區,今天就一起來了解下究竟什么是“L2”。
未來完全自動駕駛所需階段,L2級別自動駕駛必須具備的四個系統。
自適應巡航系統也叫ACC自適應巡航系統,現在主機廠采購的ACC絕大多數來自博世,當前商用最新的是第三代ACC自適應巡航系統。
ACC主要通過安裝在車輛前部的車距傳感器(雷達)持續掃描車輛前方道路,同時輪速傳感器采集車速信號進行分析。當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統,發動機控制系統協調動作,降低車速,以使車輛與前方車輛始終保持安全距離,當前方距離達到安全時再恢復到原有設定速度。
在車輛轉彎的時候,車子很容音因為駕乘者打方向不準而偏離車道,尤其是剛剛拿證不久的新手駕駛員。轉彎時一旦跑到逆行的車道上會非常危險。而車道保持輔助系統可自動識別車道線,如果車輛偏離車道,方向盤將抖動提醒駕駛席,系統還可自動進行反向修正,從而確保行駛穩定性,大大降低危險發生的可能。
自動剎車輔助系統(AEB),是指車輛在非自適應巡航的情況下正常行駛,如車輛遇到突發危險情況或與前車及行人距離小于安全距離時主動進行剎車(但具備這種功能的車輛并不一定能夠將車輛完全剎停)避免或減少追尾等碰撞事故的發生,從而提高行車安全性的一種技術。

該系統在不同的廠家有著不同的名字,例如豐田的預碰撞安全系統稱為Pre-Collision System,簡稱PCS;本田的CMBS(Collision Mitigation Brake System)以及奔馳的pre-safe系統等,但工作原理是相同的。
一般來說,AEB由兩個系統組成,包括車輛碰撞迫近制動系統(CIB)和動態制動支持系統(DBS),其中CIB系統會在追尾以及駕駛員未采取任何行動的情況下,會緊急制動車輛,而DBS在駕駛員沒有施加足夠的制動行動時,會給予幫助避免碰撞。
自動泊車系統一般包括圖像采集系統、車距檢測系統、中央處理器和車輛策略控制系統,當啟動自動泊車功能以后,安裝在汽車四周的攝像頭和探測雷達可以檢測停車位周邊的環境,測量出車身與左右、前后汽車的距離和相對角度,將這些信息反饋給中央處理器分析,從而計算出汽車的當前位置和目標停車位置,進而自動制定出對應的停車策略,來控制汽車的微小轉向和前進后退,慢慢把車挪到指定位置。
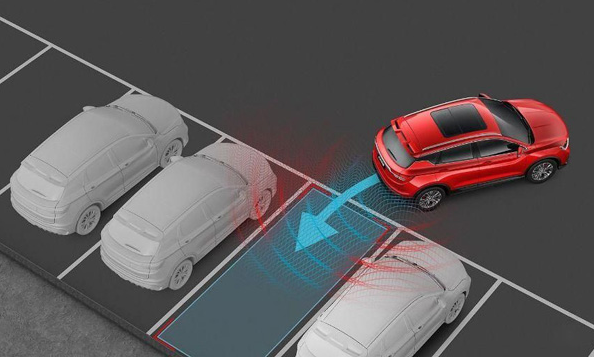
不過需要說明的是,目前很多自動泊車系統并不能實現全自動,只能稱之為半自動泊車,因為還需要車主踩著制動踏板來控制好車速或者換擋,這就需要車主在泊車過程中不能放松警惕,要時刻盯著倒車的情況。但是在停車過程中,其實最難把握的是轉向角度,尤其是側方位停車,很多新手都是因為搞不清方向盤要打多少、什么時候打而停車失敗,自動泊車系統在這方面就做得比較好。
不同車型的L2級別自動駕駛系統
通過了解L2級別自動駕駛必須具備的四個系統,我們也可以知道它雖然歸屬于“自動駕駛系統”,卻離真正的“自動駕駛”很遠,僅僅是能夠更智能化的幫助我們使用車輛而已。
[總結]由此可見大多數廠家各種看似高科技的“自動駕駛系統”名稱,其實也是換湯不換藥。而“L2級別自動駕駛系統”并不等于真正的自動駕駛,并且本身也還有很大的進步發展空間。在不同的車型上也有不同的表現,這也要求我們不能依賴這一系統。突破人眼,這一點相信也是目前大部分廠家都在攻克的難點。



