

據(jù)外媒報(bào)道,美國(guó)專利商標(biāo)局(U.S. Patent and Trademark OFFice)授予了蘋(píng)果公司一項(xiàng)泰坦項(xiàng)目專利,即用于推理、決策和運(yùn)動(dòng)規(guī)劃的機(jī)器學(xué)習(xí)系統(tǒng)和算法,以控制自動(dòng)駕駛或部分自動(dòng)駕駛的車輛。

蘋(píng)果泰坦項(xiàng)目概念圖(圖片來(lái)源:patentlyapple.com)
機(jī)動(dòng)車輛可以感知環(huán)境,并在沒(méi)有或僅有少數(shù)持續(xù)輸入的情況下進(jìn)行導(dǎo)航,因此被稱為自動(dòng)駕駛或無(wú)人駕駛車輛,是當(dāng)前研究和開(kāi)發(fā)的重點(diǎn)。近日,由于收到可用硬件和軟件的限制,執(zhí)行用于分析車輛外部環(huán)境相關(guān)計(jì)算的最大速度還不足以在無(wú)人工指導(dǎo)下做出重要的導(dǎo)航?jīng)Q策。然而,即使使用快速處理器、大內(nèi)存和先進(jìn)算法,在不可預(yù)測(cè)的行為背景下,自動(dòng)駕駛車輛在客觀上也很難做出及時(shí)和合理的決策。不僅如此,車輛環(huán)境相關(guān)的靜態(tài)和動(dòng)態(tài)組件數(shù)據(jù)也不夠完整,且干擾信息很多。
通過(guò)采用基于神經(jīng)網(wǎng)絡(luò)的強(qiáng)化學(xué)習(xí)模型,各種方法和裝置實(shí)例可評(píng)估自動(dòng)駕駛車輛不同大小的行動(dòng)空間。根據(jù)一些實(shí)例,一種方法可包括確定自動(dòng)駕駛或部分自動(dòng)駕駛車輛在出行各個(gè)時(shí)間點(diǎn)當(dāng)前狀態(tài)的表示。
關(guān)于當(dāng)前狀態(tài),該方法還可包括可行的識(shí)別操作。例如,在一個(gè)實(shí)例中,使用車輛傳感器捕獲的數(shù)據(jù)可在車輛的行為規(guī)劃器決策組件處進(jìn)行本地處理,并與地圖信息相結(jié)合,以確定當(dāng)前狀態(tài)和可行動(dòng)作。
在美國(guó)某些州,當(dāng)車輛在較為空曠,且?guī)坠锘驇子⒗飪?nèi)無(wú)轉(zhuǎn)彎的直線高速公路上行駛時(shí),要評(píng)估的動(dòng)作數(shù)量可能相對(duì)較少;但在其他州,當(dāng)車輛接近擁擠的十字路口時(shí),動(dòng)作的數(shù)量可能會(huì)較多。
在各種實(shí)例中,每個(gè)動(dòng)作可以包括多個(gè)不同組成屬性或特性,例如起點(diǎn)/源車道段(評(píng)估動(dòng)作時(shí)車輛所在的車道段)、目標(biāo)車道段(如果執(zhí)行該動(dòng)作,車輛將位于的車道段),目標(biāo)車道段中的目標(biāo)速度,相對(duì)于一個(gè)或多個(gè)其他車輛或物體的定位等。
車輛的決策組件可能負(fù)責(zé)評(píng)估給定狀態(tài)下的不同可行動(dòng)作,選擇其中一個(gè)動(dòng)作進(jìn)行實(shí)施,將所選動(dòng)作的抽象表示轉(zhuǎn)換為詳細(xì)的運(yùn)動(dòng)計(jì)劃,并向車輛的低級(jí)運(yùn)動(dòng)控制子系統(tǒng)(例如加速子系統(tǒng)、轉(zhuǎn)向子系統(tǒng)等)發(fā)出指令,以實(shí)現(xiàn)對(duì)應(yīng)于所選動(dòng)作的軌跡。
在一些少數(shù)實(shí)例中,多個(gè)實(shí)例或強(qiáng)化學(xué)習(xí)模型或可應(yīng)用于車輛中,以獲得動(dòng)作的相應(yīng)價(jià)值度量,且該價(jià)值度量可用于選擇要實(shí)施的動(dòng)作。而在另一些少數(shù)實(shí)例中,基于深度神經(jīng)網(wǎng)絡(luò)的機(jī)器學(xué)習(xí)模型(例如使用圖形或圖像輸入訓(xùn)練的卷積神經(jīng)網(wǎng)絡(luò)模型)可用于強(qiáng)化學(xué)習(xí)模型。
蘋(píng)果的專利圖1為系統(tǒng)環(huán)境示例圖,其中可以使用強(qiáng)化學(xué)習(xí)模型評(píng)估不同大小的動(dòng)作空間,以助力指導(dǎo)車輛運(yùn)動(dòng)。在各種實(shí)例中,乘員可能會(huì)忽略車輛的決策組件做出決定,甚至?xí)簳r(shí)禁用車輛的決策組件;此外,在至少一個(gè)實(shí)例中,車輛的決策部件可以請(qǐng)求或要求乘員在特定條件下做出決策。
蘋(píng)果專利圖1(圖片來(lái)源:patentlyapple.com)
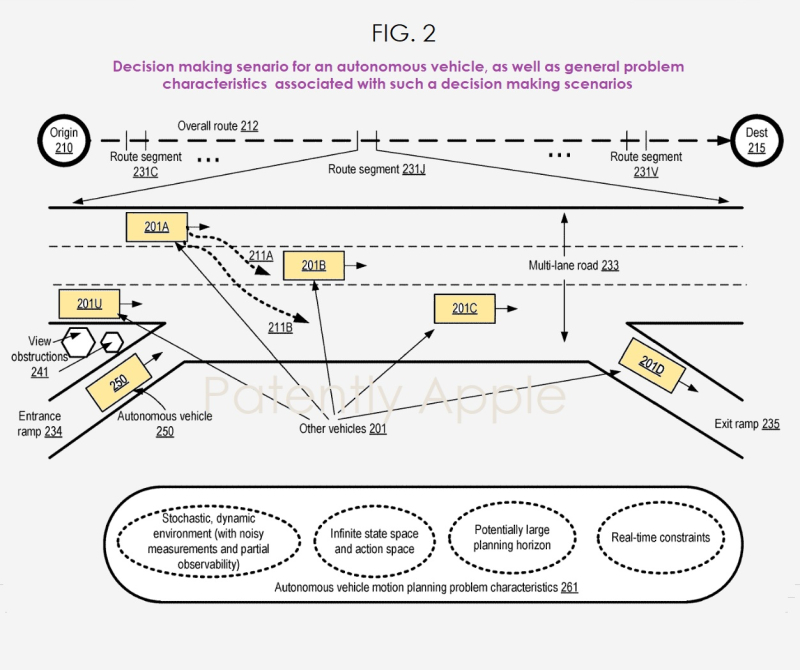
蘋(píng)果專利圖2為自動(dòng)駕駛車輛決策場(chǎng)景的示例圖,并展示了此類決策場(chǎng)景的相關(guān)問(wèn)題特征。該系統(tǒng)必須了解駕駛員當(dāng)前路線以及并道的方式和時(shí)間;何時(shí)駛出坡道或變道;了解多種車速,以確保并道安全;檢測(cè)路況;了解路標(biāo)和路燈(停車、小心、前行)等等。該系統(tǒng)需要實(shí)時(shí)處理很多信息。
蘋(píng)果專利圖2(圖片來(lái)源:patentlyapple.com)
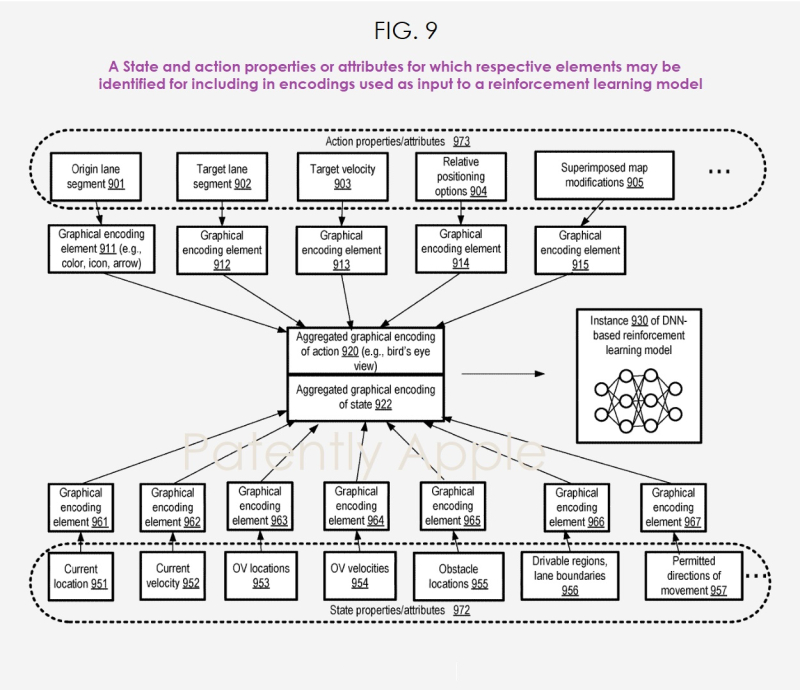
蘋(píng)果專利圖9為狀態(tài)和動(dòng)作屬性或?qū)傩缘氖纠渲械膶?duì)應(yīng)因素可被識(shí)別僅編碼中,用于輸入強(qiáng)化學(xué)習(xí)模型。
蘋(píng)果專利圖9(圖片來(lái)源:patentlyapple.com)
對(duì)于給定的可行動(dòng)作,要在編碼中表示的屬性或?qū)傩约?973)可以包括,例如,源或當(dāng)前車道段(#901)、目標(biāo)車道段(#902)、目標(biāo)速度或速度(#903)、相對(duì)于目標(biāo)車道段中的一輛或多輛其他車輛的相對(duì)定位選項(xiàng)(#904),以及上述實(shí)例軌跡中的可選疊加地圖修改(#905)。



