

Waymo 是什么來頭?
Waymo 實際上就是谷歌旗下無人駕駛汽車項目一個獨立的公司,按照官方的說法,Waymo 公司名所代表的是“A new way forward in mobility”(未來新的出行方式)。在此前國外知名咨詢公司 Navigant的一份新報告中顯示,Waymo 在目前全球的自動駕駛公司中排名第二,僅次于通用汽車。

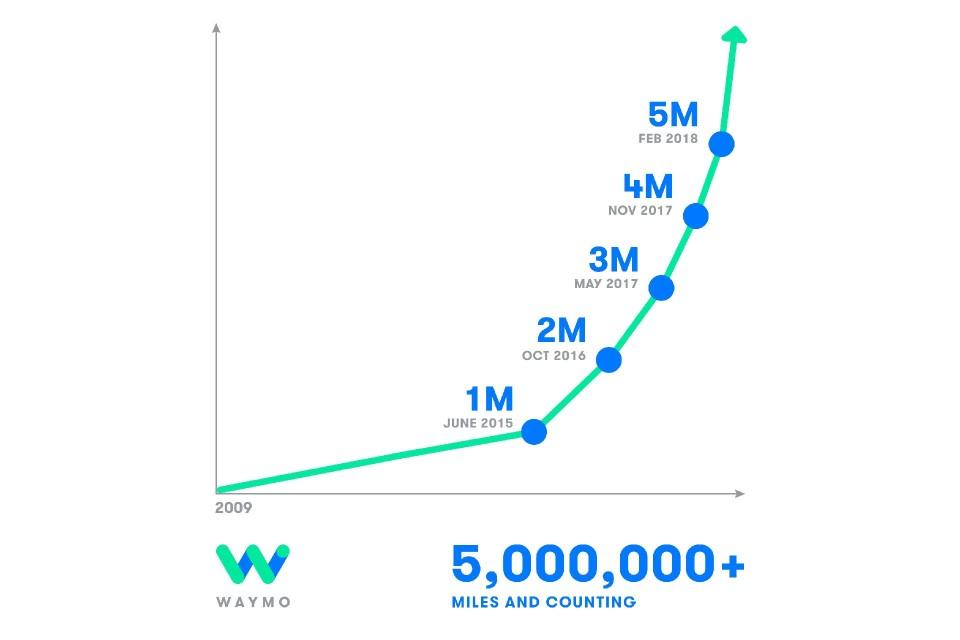
Waymo 的前身其實就是谷歌的自動駕駛測試項目,早在 2009 年谷歌就開始進行自動駕駛車的測試。正是由于谷歌的先發優勢,截止到今年(2018 年) 3 月份,Waymo 宣布其自動駕駛測試車的累積測試里程突破 500 萬英里(約 800 萬公里),成為目前累積測試里程最長的自動駕駛公司。而作為對比,Uber 截止到去年(2017 年)12 月累計測試里程只有 200 萬英里。
Waymo 的那些自動駕駛測試車
Waymo 的自動駕駛測試早在 2009 年就開始了,早期還沒從谷歌獨立出來。2009 年的時候采用的測試車是豐田普銳斯車型。

到了 2012 年,雷克薩斯 RX450h 加入Waymo 的自動駕駛測試車隊,并開始在高速公路上進行測試。同期還邀請谷歌的員工把自動駕駛測試車當作工作用車以及周末出行用車,模擬車主日常使用環境來對自動駕駛技術進行測試。此外還在市區道路對自動駕駛技術進行測試。

2015 年Waymo 設計了一款名為“螢火蟲”(Firefly)的全新車型來測試自動駕駛技術。同時“螢火蟲”也是 Waymo 對未來全自動駕駛車的探索,針對各種傳感器做了相應的定制化設計,并且這輛車沒有方向盤也沒有剎車和油門踏板。

到了 2017 年,克萊斯勒 Pacifica 插電式混動版加入 Waymo 自動駕駛測試車隊,該車是由 Waymo 與克萊斯勒基于Pacifica 插電式混動版打造,能完美到將所有自動駕駛相關到傳感器集成到車上,使得新車的整體造型和普通版本沒有太大的區別。

2018 年 3 月 28 號,Waymo 再次牽手捷豹路虎,雙方宣布將合作研發打造自動駕駛版本的捷豹I-PACE,而這也將成為 Waymo 的首款純電動自動駕駛測試車。而且這次的數量也創 Waymo 新高,捷豹路虎一共將提供 2 萬輛 I-PACE。

Waymo 的雷達、視覺和聽覺三重檢測自動駕駛路線 Waymo 的自動駕駛技術路線,采用的是激光雷達+視覺+聽覺的三種檢測路線。在一輛 Waymo 自動駕駛測試車的車身周圍,遍布了包括激光雷達系統、視覺系統、雷達系統以及其它的輔助系統,它們共同構成了車輛和外界環境接觸的渠道。
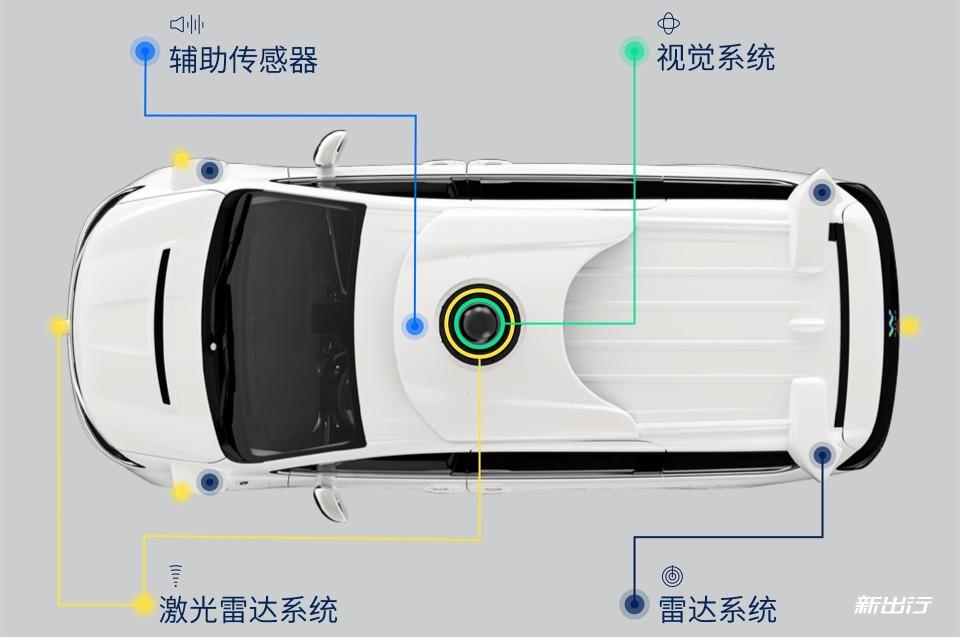
激光雷達系統:Waymo 的激光雷達系統主要作用是用來建立車輛周圍的環境模型,能實現 360° 全景探查和監控,系統可以全天候的向周圍發生激光脈沖,通過脈沖反射回來的數據來感知周圍的環境,并建立 3D 模型。Waymo 的激光雷達視線范圍可以達到 3 個足球場那么大。

視覺系統:視覺系統就相當于車輛的眼睛,不過與人眼最大視線范圍只有 120°不同,Waymo 的視覺系統視覺范圍同樣可以達到 360° 全景。并且搭載的高清攝像頭可以精準的識別周圍物體的顏色,包括交通指示燈、施工地區、校車、應急車輛閃光燈等等;此外在低亮度的環境下也能具備較高的感知能力。
雷達系統:Waymo 的雷達系統與激光雷達系統有所不同,主要是用來感知物體及其運動,包括周圍車輛的行駛速度、以及行人、單車等物體的運動趨勢。此外這種波長能穿透雨滴等目標物,使得車輛在雨雪霧天氣也能正常行駛。
輔助傳感器系統:Waymo 的輔助傳感器系統包括有音頻檢測系統等,可以用來檢測報警聲、警笛、喇叭聲等等音頻,提高自動駕駛能力。
能預測其它交通參與者的行為趨勢 老司機般的軟件設計邏輯
在了解了 Waymo 的硬件組成部分以后,我們再來看看 Waymo 在自動駕駛軟件的設計邏輯方面又是怎么樣的。在此前 Waymo 公布的一份自動駕駛技術報告中,將自己的自動駕駛技術歸類到國際汽車工程師學會(SAE International)定義的 4 級自動駕駛中,若遇到任何系統故障,Waymo的技術可實現車輛的安全停靠,將安全風險降至最低。
美國汽車工程師學會 (Society of AutomotiveEngineers) 給出的自動駕駛評定標準:
L0:無自動駕駛,由人類駕駛員全權操控汽車,可以得到警告或干預系統的輔助;
L1:駕駛支援,通過駕駛環境對方向盤和加減速中的一項操作提供駕駛支持,其他的駕駛動作都由人類駕駛員進行操作;
L2:部分自動化,通過駕駛環境對方向盤和加減速中的多項操作提供駕駛支持,其他的駕駛動作都由人類駕駛員進行操作。
L3:有條件自動化,由自動駕駛系統完成所有的駕駛操作。根據系統要求,人類駕駛者需要在適當的時候提供應答。
L4:高度自動化,由自動駕駛系統完成所有的駕駛操作。根據系統要求,人類駕駛者不一定需要對所有的系統請求做出應答,包括限定道路和環境條件等。
L5:完全自動化,在所有人類駕駛者可以應付的道路和環境條件下,均可以由自動駕駛系統自主完成所有的駕駛操作。
在 Waymo 的自動駕駛技術中,得益于強大的硬件能力,車輛能對道路、以及其它交通參與者(例如普通車輛、自行車、摩托車、行人等)進行精準識別,同時還能通過大量不斷的場景化測試對這些行為進行下一步動作的預測,并作出預防性的準備路線規劃。
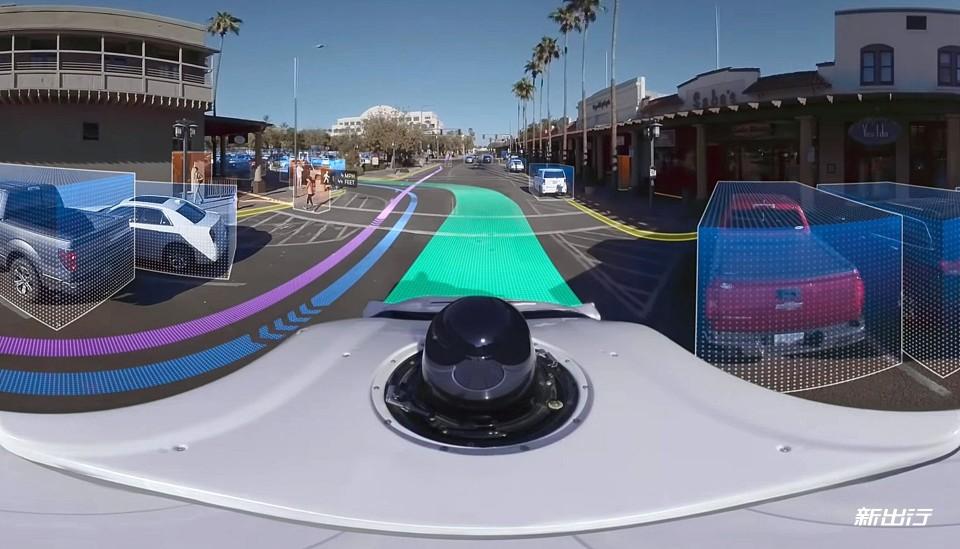
比如在遇到前方有行人、單車或者摩托車時,Waymo 的自動駕駛車會判斷前方的行人是否會突然沖出馬路、單車是否會突然停車、摩托車是否會突然轉向等等這些行為,并規劃好相應的路徑隨時做好準備。

這種“防御式”自動駕駛是 Waymo 的一個重要亮點,也是 Waymo 自動駕駛車輛通過大量不同環境的路測來積累各種場景數據并作出應對方案,道理也跟人為駕駛中我們常說的老司機雷同。老司機駕駛技術好就是通過長時間的駕駛積累經驗,而其中最重要的技能便是能提前預判。

又例如另一種情況,遇到前方有車道封閉,Waymo 自動駕駛車會提前預判到前方的摩托車可能會變道,于是 Waymo 自動駕駛系統便會提前規劃好路徑,給前面的摩托車留出變道的空間,防止意外的發生。
在 Waymo 此前公布的自動駕駛報告中,將以上這一系列自動駕駛邏輯總結為“感知”、“行為預測”以及“規劃軟件”3 各部分。感知便是前面提到的能對道路上的其它交通參與者、交通設置、交通環境等系列元素進行一一識別和正確分類。“行為預測”便是在“感知”的基礎上對其它交通參與者的行為做出正確的預判,在此基礎上“規劃軟件”再對自動駕駛車的下一步動作做出規劃,完成整個自動駕駛的全過程。
新出行點評:
目前在自動駕駛領域中,Waymo 和通用是排在前面的兩位。與通用收購 Cruise 不同,Waymo 走的是通過自己開發自動駕駛硬件和軟件,再和車企合作將整套自動駕駛技術集成到車上的路線,這種技術路線在未來大規模應用之后是否可行還有待時間驗證,但從目前 Waymo 的自動駕駛測試進展來看,自動駕駛技術已經趨于成熟,只不過自動駕駛環境還有待提升。



