

如圖1所示,當車輛在彎道行駛時,在距離彎道一定距離之前,需要對車速進行控制使車輛可以安全通過彎道(一般情況下進行減速)。該問題的難點在于如何使車輛從當前的車速在入彎時到達期望車速,既要保證入彎速度快,又要保證消耗能量少,同時較好地兼顧車輛行駛舒適性與安全性。彎道行駛時的安全速度規劃問題即從車輛當前位置開始對速度開始進行控制,直到車輛在入彎時達到期望的安全車速,同時保證車輛的橫向運動安全性與舒適性。
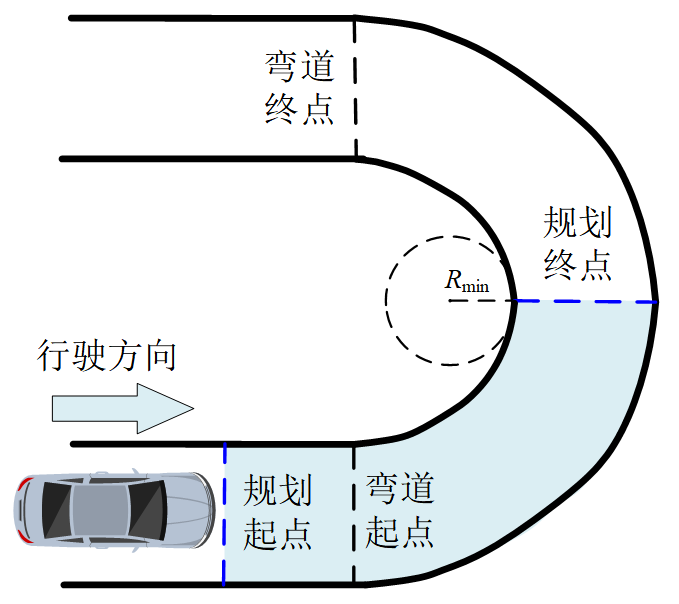
圖1 彎道行駛場景
對彎道中的速度規劃問題見文末延伸閱讀部分,本文就對車輛安全過彎中的速度規劃問題進行深入探討。
一、安全車速
車輛安全車速直接關系著智能車的安全性與乘坐舒適性,因此,在速度規劃時必須將車輛安全車速作為一個約束條件進行考慮,比如彎道行駛時需要根據道路曲率限制車輛速度,在車輛入彎之前就平穩減速。安全車速研究的是速度與曲率的關系,通過引入橫向加速度和橫擺角速度建立安全車速模型,并出于對車輛穩定性和乘坐舒適性等因素的考慮,對橫向加速度和橫擺角速度施加約束條件,如式(1)所示:
其中,分別為車輛最大橫向加速度和最大橫擺角速度;ky和為乘坐舒適性系數;μ為車輛橫向附著系數;κ為道路曲率,g = 9.8m/s2為重力加速度。為了保證車輛彎道行駛安全性,需要根據動態變化的環境信息對車輛速度進行限制,尤其是基于曲率的車輛自適應動態限速,根據式(1)可得:
由式(2)可知,入彎過程安全車速的計算前提是確定最大橫向加速度,根據考慮的因素不同,目前主要有表1所示的六種安全車速模型。
雷諾
1.1.考慮摩擦圓的最大加速度
許多方法考慮車輛穩定性和乘坐舒適性,基于摩擦圓的性質將最大橫向加速度表示為。圖2描述了輪胎力摩擦圓,在橫向側偏角和縱向滑移力的共同作用下產生的總輪胎力需小于μFz。圖2中不同圓弧表示不同的橫縱向輪胎力組合,對應不同側偏角和滑移率水平。對于同一縱向滑移率,縱向力Fx隨側偏角的增加而減小,反之亦然。縱向滑移率sx由0.01增加到0.61時,Fx逐漸變大至飽和,達到道路附著極限,此時的圓弧即為摩擦圓,由橫縱向力構成的圓弧需分布在摩擦圓內以保證車輛穩定性。

圖2 輪胎力摩擦圓
1.2.基于駕駛特征提取的最大橫向加速度
Malcolm的研究表明:人類駕駛員不只按摩擦極限的標準確定安全車速,在車速超過20 km/h時,駕駛員往往會預估高速行駛帶來的危險,可接受的橫向加速度并非恒定,而是與速度呈反比。基于該結論,Reymond提出橫向加速度裕度模型ay = k1-k2v2,系數k1、k2根據實驗數據擬合得到。類似的,還有根據不同駕駛場景下的真實行駛數據擬合出的Levison安全模型模型、考慮人類運動通用特征的擬人式駕駛員模型,系數k3、k4、k5均由實驗數據擬合得到。Bosetti等考慮低速時橫向加速度飽和的情況,對Levison模型加以修正,如表1所示。
以上安全速度模型僅保證當前位置的安全性,當未來道路曲率增長較快時,存在難以按期望減速度將速度減至期望速度的情況,此時當前位置的車速是不合理的,故安全車速模型不能只考慮當前位置的安全性,還需考慮未來減速過程中的安全性,因此基于經驗公式建立考慮橫縱向加速度協調關系的安全車速模型
式中不同C值代表不同駕駛行為,|C| 越大,縱向加速度ax越大,駕駛行為越激進,故定義C為激進因子。針對任意道路曲率已知的彎道,考慮經驗駕駛行為的縱向速度僅取決于C值,故為滿足摩擦圓的限制,C的可行域Ω需滿足式(3),其上下界分別對應縱橫向最大加速度,如圖3所示:

圖3 不同激進因子C下橫縱向加速及摩擦圓
設車輛安全車車速為Vlim,其需要滿足:
其中,Vmax為滿足交通規則限制的最大車速,,C為根據實車駕駛行為標定的參數。
二、G-planning多項式速度規劃方法
定義考慮式(3)安全車速的多項式速度規劃方法為G-planning方法,其中,為保證沖擊度連續性和求解效率,采用三次多項式建立速度模型,如下式所示:
其中,s、v分別表示速度規劃過程中的規劃里程和縱向車速。通過計算速度對時間的一階導、二階導,分別得到縱向加速度和沖擊度的表達式:
其中,上角標表示對里程求導。
車輛舒適、平穩且安全過彎問題可構建為考慮滑行行為、通行時間和安全車速的多目標優化問題,滿足車輛在速度規劃起點和終點處的狀態約束:
及舒適性約束:
根據規劃起點和終點的邊界條件,可求得安全過彎的參考速度模型為:
由于考慮了經驗駕駛行為、摩擦圓約束、高階非線性舒適性約束、具有不確定性的駕駛特征約束等約束條件,導致度規劃問題求解非常復雜。因此,為了兼顧求解效率和全局最優,提出一種基于混沌優化的實時求解算法。求解后的最佳規劃距離如圖4所示,不同參數值反應了不同水平的舒適性和效率性,進而決定不同的規劃距離。圖5繪制了不同初速度下的橫縱向加速度曲線,可見滿足摩擦圓約束。

圖4 不同參數下的最佳規劃距離

圖5 不同初速度下橫縱向加速度對比
圖6繪制了規劃時間與縱向最大加速度曲線,由此可得:G-Planning方法在低入彎速度時,雖然最大縱向加速度更大,但其值仍然很小,此時兩種方法的舒適性均較好。在中初速度時最大減速度更小、舒適性更好。高速入彎時,在保證舒適性的前提下,規劃時間大幅縮短,通行效率顯著提高。G-Planning方法的規劃結果體現了有經驗的駕駛員低初速度時采用滑行方式入彎、高初速度時不以犧牲通行效率來追求絕對舒適性的駕駛習慣,更好地平衡了乘坐舒適性與通行效率。

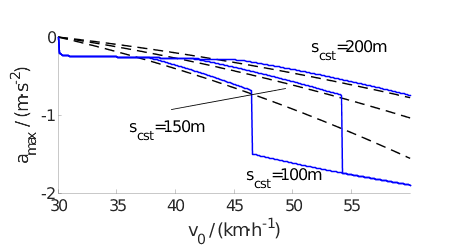
圖6 規劃時間與縱向最大加速度對比
三、基于多項式的進出彎速度快速規劃方法
針對如圖1所示的彎道行駛場景,假設車輛依次通過了兩個彎道1和2,并假設車輛行駛的縱向速度與行駛里程之間的關系如圖7所示,減速通過彎道后又加速至目標車速,可將該復雜的彎道駕駛行為描述為一個安全車速優化求解問題。
圖7 安全車速求解問題描述
定義車輛縱向運動為三階動力學系統:
其中,分別為車輛縱向行駛里程、車速、加速度和沖擊度。
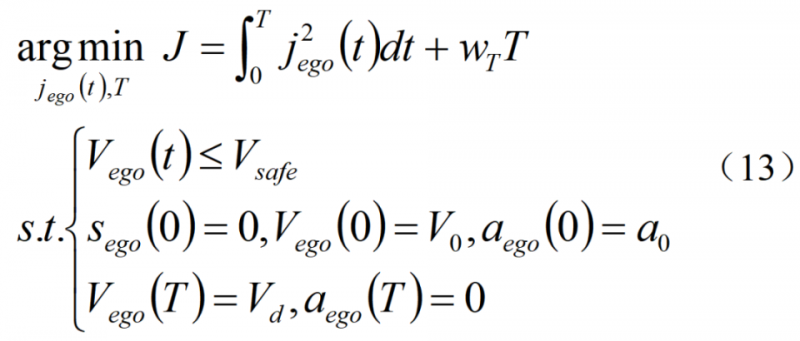
車輛平穩與安全過彎問題即求解如下優化問題以尋找最優的沖擊度輸入和行駛時間:
同時,滿足邊界約束:
以及安全速度約束:
其中,多目標優化問題(10)中包含兩個優化目標:快速通行即行駛時間T最短,平穩過彎即舒適性(或沖擊度)最小,wT表示兩個目標間的權重系數。則車輛過彎的安全車速規劃問題可描述為如下優化問題:
考慮到該問題的復雜性,同時規劃減速入彎與加速出彎兩個過程中的安全車速難度較大,因此,將這兩個階段的規劃問題獨立成兩個子問題依次求解。
3.1 減速入彎過程
減速入彎過程實質上就是點到點的速度規劃問題,比如圖7中的A-C或者A-B,該局部優化問題相對全局規劃問題(13)更容易求解。由于C點處的曲率更大,其安全車速更低,故以A-C作為研究對象。則在C點處的邊界條件為:
其中,到達C點的時間TC未知,C點處的安全車速為Vc。
根據起點A和急彎C點處的邊界條件,假設車輛行駛里程可用5次多項式來描述,即
則求導可得速度、加速度和沖擊度為

其中,系數ci可由邊界條件求得,即
車輛需滿足舒適性、安全性約束條件
其中,分別為車輛安全極限車速、最大加速度及最大沖擊度。化簡可得TC的取值范圍為,在該可行域內的規劃模型(13)等價于
顯然,該規劃模型(19)是一個帶約束的單變量非線性優化模型,其優化變量是,根據KKT原理,其最優解將出現在極值點或邊界點處。假設極值點為TC0,則通過比較極值點和邊界點的代價函數值大小即可實現該規劃模型的求解。考慮其極值點滿足條件
求導后可得
則通過求最小的代價函數值
即可求得最優的到達時間,進而規劃出最優的入彎速度。
3.2 加速出彎過程
加速出彎過程實質上是自由加速問題,圖7中C-D過程中的局部優化問題相對全局規劃問題(13)也將更容易求解。以C-D過程作為研究對象,起點C點的時間記為0,在C和D點處的邊界條件為:
其中,由C點出發到達D點的時間TD未知,則整個平穩過彎過程的時間為T=TC+TD。
與入彎過程相類似,假設車輛行駛里程可用5次多項式來描述,即
其中,系數ci可由邊界條件求得,即
性能約束條件與(18)相同,將其化簡后得:
加速出彎過程的規劃模型(13)等價于
其極值點滿足條件
可得極值點為
根據導數函數(28)的特點,當時,最優的到達時間為;當時,則最優的到達時間為,進而規劃出最優的出彎速度。
綜上,通過求解最優的到達時間和,進而規劃出整個平穩過彎過程的速度,則過彎時間即由A到D的總行駛時間為。



