近日,IMT-2020(5G)推進組C-V2X工作組發布了《MEC與C-V2X融合應用場景》白皮書。
白皮書里面詳細描述了MEC與C-V2X融合的11個應用場景,請針對每個場景中的MEC能力需求進行了歸納總結。
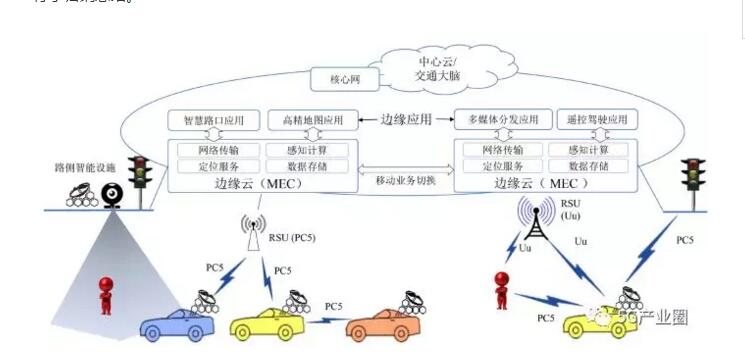
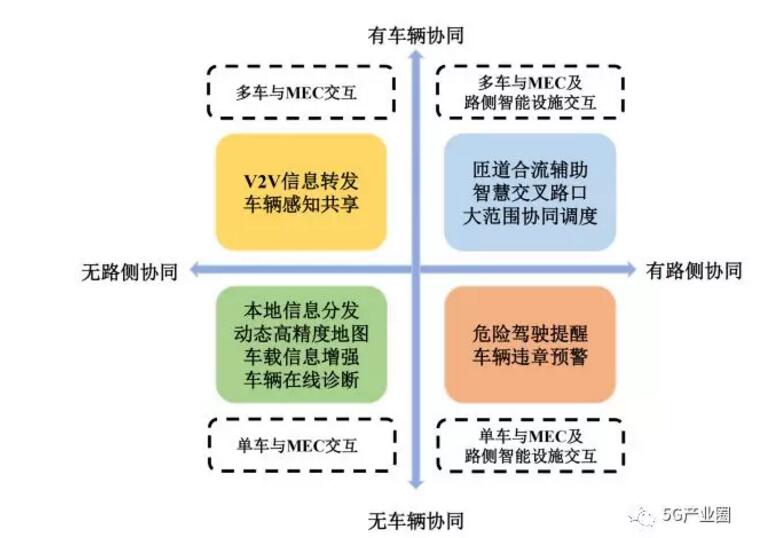
MEC與C-V2X融合場景視圖
這11個場景被歸為4類,今天小編就帶大家來看看這些應用場景到底是怎樣的。
單車與MEC交互場景
在C-V2X應用中,本地信息分發、動態高精度地圖、車載信息增強、車輛在線診斷等功能通過單車與MEC進行交互即可實現。
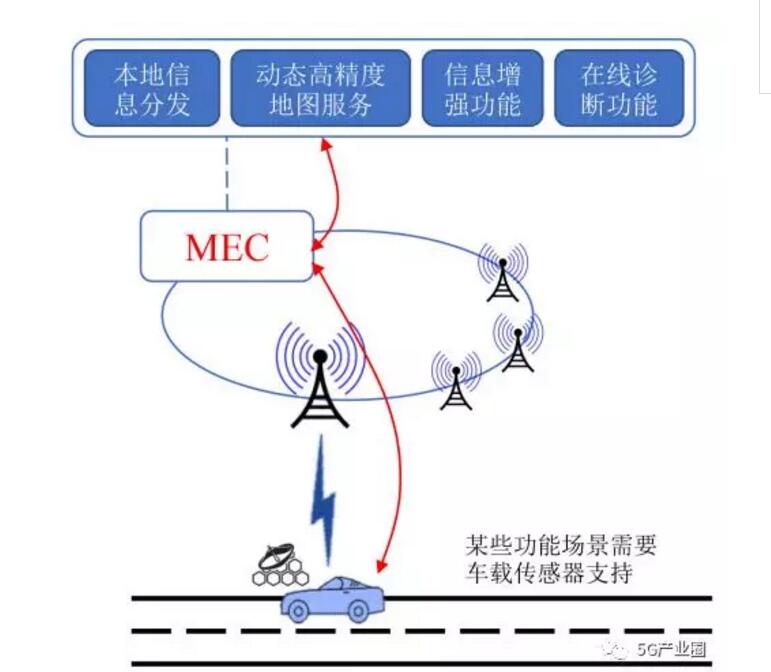
單車與MEC交互場景示意圖
1、本地信息分發
MEC作為內容分發的邊緣節點,實現在線分發和流量卸載的功能。可為車輛提供音視頻等多媒體休閑娛樂信息服務、區域性商旅餐飲等信息服務,或提供軟件/固件升級等服務。
在此類場景中,MEC的部署位置可根據接入用戶數和服務流量靈活選擇,通常可選擇部署在 RSU或基站的匯聚節點后,為相對較大的范圍提 供服務。
車輛無需裝配智能傳感器等設備,在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
2、動態高精度地圖
MEC可以存儲動態高精度地圖車輛分發高精度地圖信息,減少時延并降低對核心網傳輸帶寬的壓力。
在應用中,車輛向MEC發送自身具體位置以及目標地理區域信息,部署在MEC的地圖服務提取相應區域的高精度地圖信息發送給車輛。
當車輛傳感器檢測到現實路況與高精度地圖存在偏差時,可將自身傳感信息上傳至MEC用于對地圖進行更新,隨后MEC的地圖服務可選擇將更新后的 高精度地圖回傳至中心云平臺。
在此類場景中,MEC提供存儲高精度地圖能力、用于動態地圖更新的計算能力,同時提供與中心云的交互能力。
在網絡部署了MEC及相應的功能服務后,車輛可利用對應的通信模組使用此類應用服務,在車輛具備智能傳感器時,可以通過上傳自身傳感信息對地圖進行更新。
3、車載信息增強
MEC提供車載信息增強功能,車輛可將車載傳感設備感知的視頻/雷達信號等上傳至MEC, MEC通過車載信息增強功能提供的視頻分析、感知融合、AR合成等多種應用實現信息增強,并將結果下發至車輛進行直觀顯示。
在此類場景中,MEC提供用于視頻分析、感知融合、AR合成等多個應用的計算能力,同時提供低時延、大帶寬的通信能力。
在網絡部署了 MEC及相應的功能服務后,車輛需裝配智能傳感器及顯示設備,并利用對應的通信模組實現數據上傳和下載。
4、車輛在線診斷
MEC可支持自動駕駛在線診斷功能。
當車輛處于自動駕駛狀態時,可將其狀態、決策等信息上傳至MEC,利用在線診斷功能對實時數據樣本進行監控分析,用于試驗、測試、評估或應對緊急情況處理。同時MEC可定期將樣本及診斷結果匯總壓縮后回傳中心云平臺。
在此場景中,MEC提供支持實時處理大量 數據的計算能力、數據存儲能力和低時延的通信 能力,同時提供與中心云的交互能力。
在網絡部署了MEC及相應的功能服務后,車輛需將自身傳感、決策、控制信息通過對應的通信模組上傳至MEC。
單車與MEC交互場景對MEC的能力要求

注:
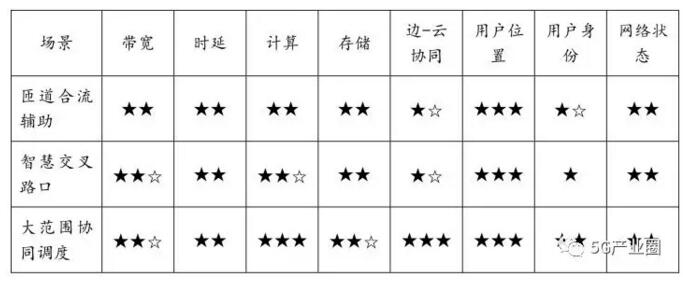
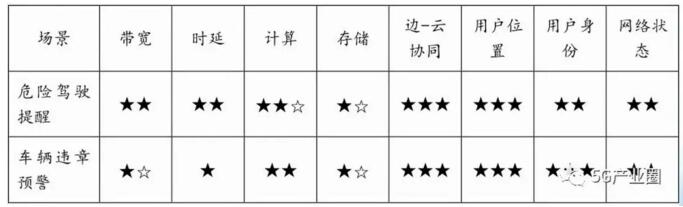
帶寬:★代表10Mbps以下,★★代表 10~100Mbps,★★★代表100Mbps以上;
時延:★代表100ms以上,★★代表20~100ms,★★★代表20ms以下;
計算:★代表支持信號控制級計算能力, ★★代表支持圖像處理級計算能力,★★★代表 需要支持智能決策、視頻編解碼、大數據分析類計算能力;
存儲:★代表TB級存儲或支持內存數據庫, ★★代表PB級或支持結構性、關系型數據庫, ★★★代表EB級或支持海量非結構性數據庫;
邊-云協同/用戶位置/用戶ID/網絡狀態:從零星至★★★分別代表了統計意義上對該要求的需求程度,零星表示完全不需要,★★★表示完全必需。
單車與MEC及路側智能設施交互場景
在C-V2X應用中,危險駕駛提醒、車輛違章提醒等功能可通過單車、路側智能設施及MEC進行交互實現。
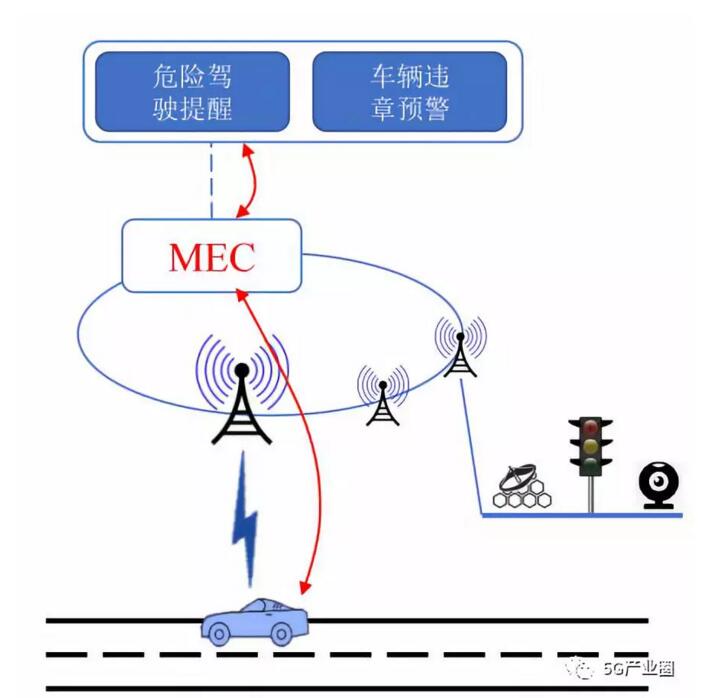
單車與MEC及路側智能設施交互場景示意圖
5、危險駕駛提醒
MEC部署了危險駕駛提醒功能后,可結合路側智能設施,通過車牌識別等功能分析車輛進入高速的時間,定期為車輛提供疲勞駕駛提醒;或在夜間通過視頻分析,提醒車輛正確使用燈光;或在感知到突發車輛事故時,提醒附近車輛謹慎駕駛;或在天氣傳感器感知到高溫“鏡面效應”、 雨雪大霧等惡劣天氣時,提醒車輛安全駕駛。
此外,MEC可階段性地將危險駕駛信息匯總后上傳中心云平臺。
在此場景中,路側的各類傳感設施實時將感知信息上傳至MEC,MEC主要提供用于視頻分析、感知融合、事件與消息整合等計算能力,保證傳感信息傳輸的通信帶寬,以及與中心云平臺進行交互的能力,同時也應提供對跨基站、跨MEC業務連續性的必要支持。
車輛無需裝配智能傳感器等設備,在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
6、車輛違章預警
MEC部署了車輛違章預警功能后,可結合路側智能設施,通過視頻識別、雷達信號分析等應用實現車牌識別,并對超速、逆行、長期占據應急車道等違章行為判定,并將違章預警信息下發對應車輛,提醒車輛遵守交通規則行駛。
此外,MEC可階段性將違章信息匯總后上傳中心云平臺。
在此場景中,路側的攝像頭、雷達等智能設 施實時將感知信息上傳至MEC,MEC主要提供支 持視頻分析、信號處理、違章判定功能等計算能 力,保證傳感信息傳輸的通信帶寬,以及與中心云平臺進行交互的能力。
在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以 直接使用此類服務。
單車與MEC及路側智能設施交互場景對MEC能力要求
多車與MEC協同交互場景
在C-V2X應用中,V2V信息轉發、車輛感知共享等功能可通過多車與MEC協同交互實現。
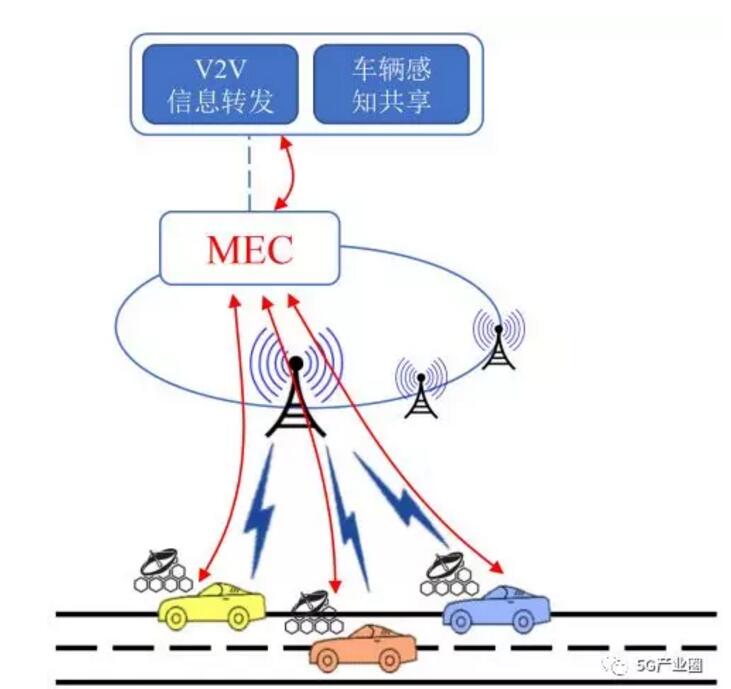
多車與MEC協同交互場景示意圖
7、V2V信息轉發
MEC部署了V2X信息轉發功能后,可作為橋接節點,以V2N2V的方式實現車與車之間的通信,實時交流車輛位置、速度、方向及剎車、開啟雙閃等車輛狀態信息,提升道路安全。
在此場景中,車輛無需裝備PC5通信模組, 可通過Uu接口將車輛狀態信息發送至MEC,并接收MEC下發的其他車輛信息。MEC應提供超低時 延的信息傳輸功能。
8、車輛感知共享
MEC部署車輛感知共享功能,可將具備環 境感知車輛的感知結果轉發至周圍其他車輛,用于擴展其他車輛的感知范圍。
也可以用于Seethrough場景,及當前車遮擋后車視野時,前車對前方路況進行視頻監控并將視頻實時傳輸至MEC,MEC的車輛感知共享功能對收到的視頻進行實時轉發至后方車輛,便于后方車輛利用視頻擴展視,有效解決汽車行駛中的盲區問題,提高車輛的駕駛安全。
在此場景中,MEC提供傳感信息、視頻流等信息的轉發功能,需要保證低時延、大帶寬的通信能力。
在See-Through 應用場景中,需要對跨基站、跨MEC的業務連續性提供必要支持。
配置了車載傳感器/攝像頭和C-V2X通信模組的車輛可向其他車輛共享自身傳感信息,僅配置通信模組的車輛可接收其他車輛共享的傳感信息。
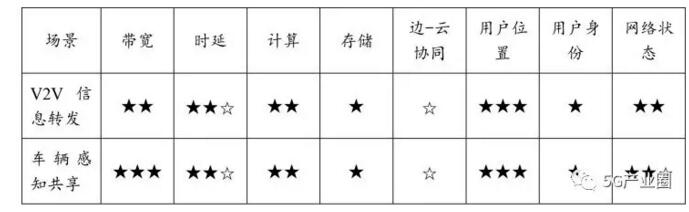
多車與MEC協同交互場景對MEC能力要求
多車與MEC及路側智能設施協同交互場景
在C-V2X應用中,匝道合流輔助、智慧交叉路口、大范圍協同調度等功能可通過多車、路側智能設施及MEC進行協同交互實現。
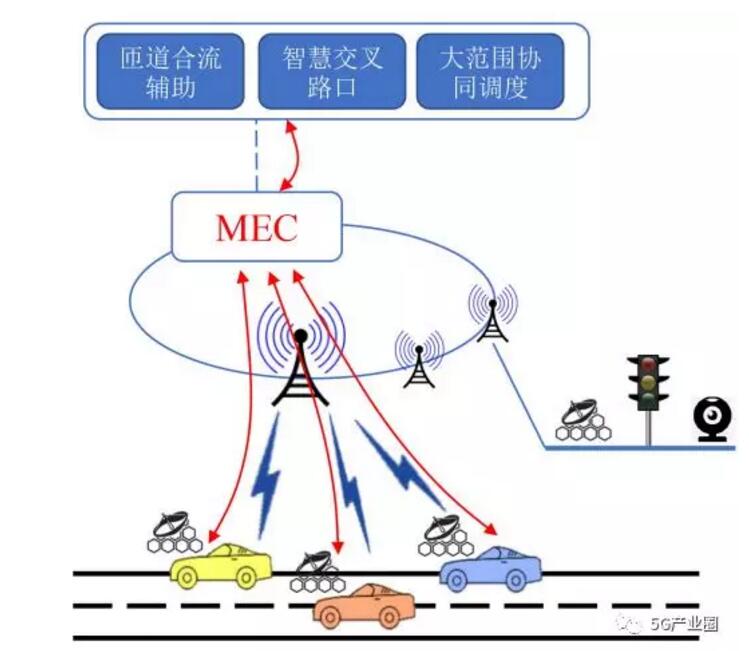
多車與MEC及路側智能設施協同交互場景示意圖
9、匝道合流輔助
MEC部署匝道合流輔助功能,在匝道合流匯入點部署監測裝置(如攝像頭)對主路車輛和匝道車輛同時進行監測,并將監測信息實時傳輸到 MEC,同時相關車輛也可以將車輛狀態信息發送至MEC,MEC的匝道合流輔助功能利用視頻分析、信息綜合、路況預測等應用功能對車、人、障礙物等的位置、速度、方向角等進行分析和預測,并將合流點動態環境分析結果實時發送相關車輛,提升車輛對于周邊環境的感知能力,減少交通事故,提升交通效率。
在此場景中,MEC提供用于監測信息分析及環境動態預測的計算能力,以及低時延、大帶寬的通信能力。車輛可通過Uu通信模式與MEC 直接交互,或通過PC5通信模式經RSU與MEC進 行交互。
10、智慧交叉路口
MEC部署智慧交叉路口功能,交叉路口處的路側智能傳感器(如攝像頭、雷達等)將路口處探測的信息發送至MEC,同時相關車輛也可以將 車輛狀態信息發送至MEC。
MEC的智慧交叉路口 功能通過信號處理、視頻識別、信息綜合等應用 功能對交叉路口周邊內的車輛、行人等位置、速度和方向角等進行分析和預測,并將分析結果實時發送至相關車輛,綜合提升車輛通過交叉路口的安全性和舒適性;同時MEC的可以通過收集和分析相關信息,對交通信號燈各相位配時參數進行優化,提高交叉路口的通行效率。
在此場景中,MEC提供用于路側感知信息 分析及路況動態預測的計算能力,以及低時延、大帶寬的通信能力。
車輛可通過Uu通信模式與 MEC直接交互,或通過PC5通信模式經RSU與MEC進行交互。
11、大范圍協同調度
MEC部署大范圍協同調度功能,可在重點路段、大型收費口處借助視頻傳感信息,通過MEC進行路況分析和統一調度,實現一定范圍內大規模車輛協同、車輛編隊行駛等功能。
或在城市級導航場景中,MEC根據區域車輛密度、道路擁堵嚴重程度、擁堵節點位置以及車輛目標位置等信息,利用路徑優化的算法對車輛開展導航調度,避免擁堵進一步惡化。
在此場景中,MEC收集多種傳感信息及大量車輛狀態信息,提供海量數據處理、綜合路徑規劃等計算能力,提供各類綜合信息的存儲能力, 并提供與中心云平臺進行交互的能力。
此外,在大范圍導航規劃應用中,MEC還應提供對跨基站、跨MEC業務連續性的必要支持。MEC的部署位置可根據接入用戶數和服務范圍靈活選擇。
在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
多車與MEC及路側智能設施協同交互場景對MEC能力要求